深度学习基础
不知道多久之前就说要写一些关于深度学习的笔记,结果被各种事情导致一拖再拖(当然也有自己懒的因素)。直到今天看完Andrej Karpathy的第三节课,我深知若再不记录,我只会学一点忘一点……
Pytorch Internals
Pytorch Internals
我这里主要记录关于pytorch中的核心数据结构——张量,其他内容大家感兴趣可以详细阅读上面讲解pytorch内部原理的博客。
张量是pytorch的核心数据结构,他由数据和元数据构成。元数据包括张量的大小,数据类型,张量所依赖的设备(CPU or CUDA?)和步幅。其中步幅(strides)是pytorch的特色之一。
每个张量都是线性存储的。我们以二维的tensor举例,实际上每个数据的内存位置都是连续的。那么pytorch引入步幅这一元数据的作用是什么?
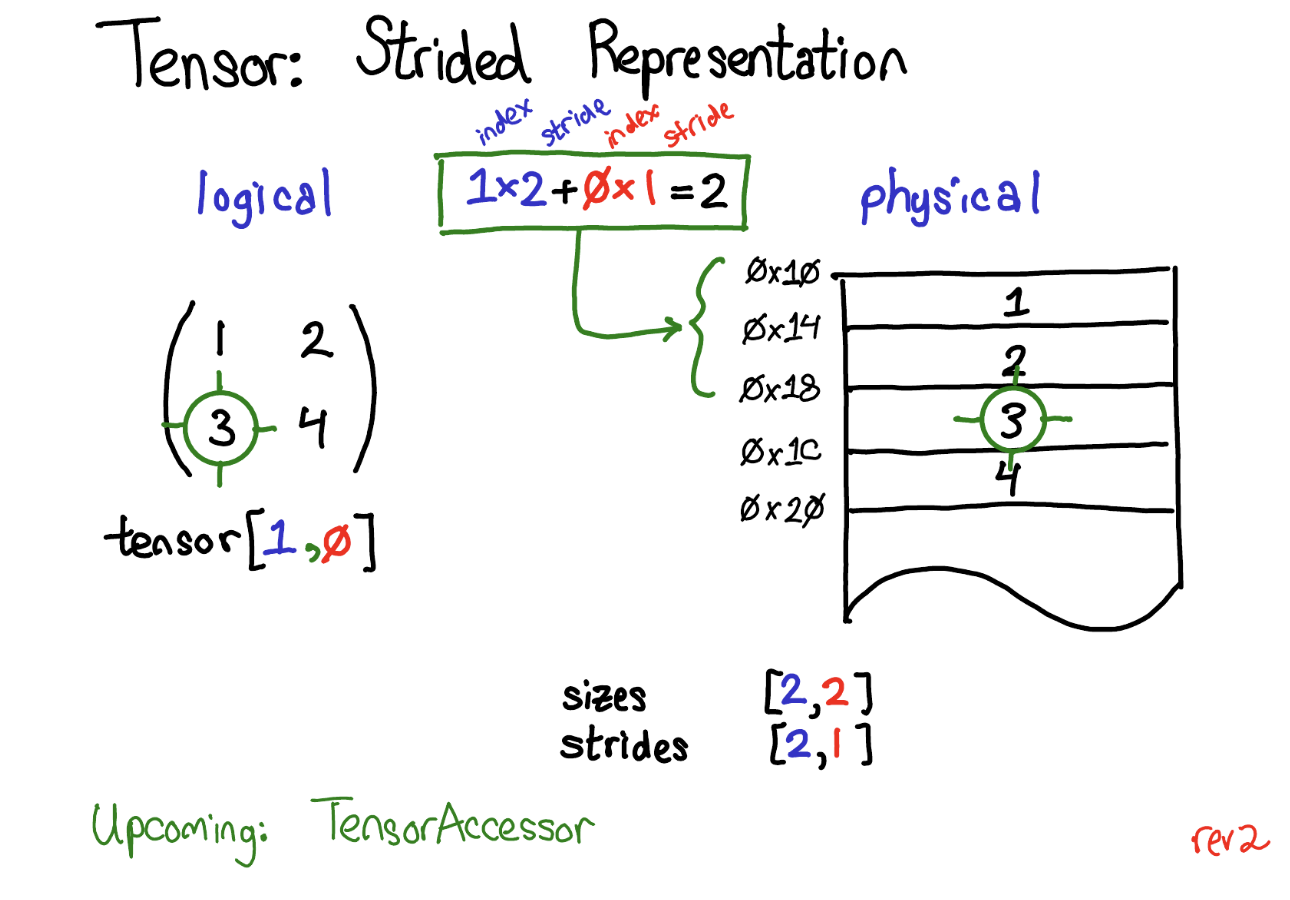
如上图,我们想要获取二维张量中(1,0)位置的数据,此时,每个维度x对应的步幅大小则为$2^x$,我们将索引和对应步幅大小乘积并求和,最后便能得到在我们想要的数据在线性内存中的位置。
步幅很有意思的应用在于,我们获取一列的数据不再需要利用循环。还是上图中的2维tensor,其中的第二列数据,通过tensor(:,1)便能很方便的获取。获取一行的数据也是类似,比如第一行,则为tensor(1,:)。
Broadcasting 广播机制
在pytorch以及numpy中,广播机制允许在进行逐元素操作时,使形状不同的张量兼容,而无需手动扩展张量的维度。广播的目的是避免显式地复制数据,节省计算资源。
广播的规则有以下四点:
- 如果两个张量的形状不同,pytorch会从后往前(右对齐)匹配,如果无法匹配,说明两个张量形状不兼容,无法广播,pytorch则会报错。
- 可以广播的条件:维度相等或其中一个张量的维度为1。
- 如果一个维度为1,则会沿着该维度进行扩展(但不会复制数据)。
- 如果某个张量缺少某个维度,pytorch会在该维度自动补充1。
下面给出一个多维度广播的示例:
1 | A = torch.tensor([[[1, 2, 3]], [[4, 5, 6]]]) # 形状 (2, 1, 3) |
One-Hot Encoding 独热编码
在机器学习中,我们通常会遇到分类问题。例如:[‘Blue’, ‘Green’, ‘Red’],我们当然可以使用[0, 1, 2]的方式对这三个颜色特征进行编码,以区分它们。但这种方式会带来问题:三个颜色之间并非等距,存在偏序关系。这种编码会使得计算机学习到一些我们并不期望得到的特征,比如认为蓝色和绿色比起蓝色和红色相似度更高,因为它们之间距离更近。
独热编码就避免了这个问题的发生。它主要是采用N位状态寄存器来对N个状态进行编码,每个状态都由他独立的寄存器位,并且在任意时候只有一位有效。
仍然是上面的例子,[‘Blue’, ‘Green’, ‘Red’]一共三种颜色,所以采用三位状态寄存器进行编码,得到:
- Blue $\rightarrow$ 001
- Green $\rightarrow$ 010
- Red $\rightarrow$ 100
我们可以看到,这三个编码互相是等距的,均为$\sqrt2$,说明它们之间具有相同的特性(均是颜色),不存在偏序关系,避免了第一种编码所出现的问题。
那么什么情况下不使用独热编码?
- 当特征之间距离定义合适,存在偏序关系时,我们不适用独热编码。比如一个人的受教育程度,分为小学,初中,高中,大学,此时我们简单的使用[0, 1, 2, 3]进行编码即可。
- 在决策树中,即使变量之间不存在任何偏序关系,我们通常也不使用独热编码。因为每个分叉仅决定“是否属于某个类别”,不关心数值的大小,所以简单的编码即可。
如何理解偏差,方差和噪声
参考博客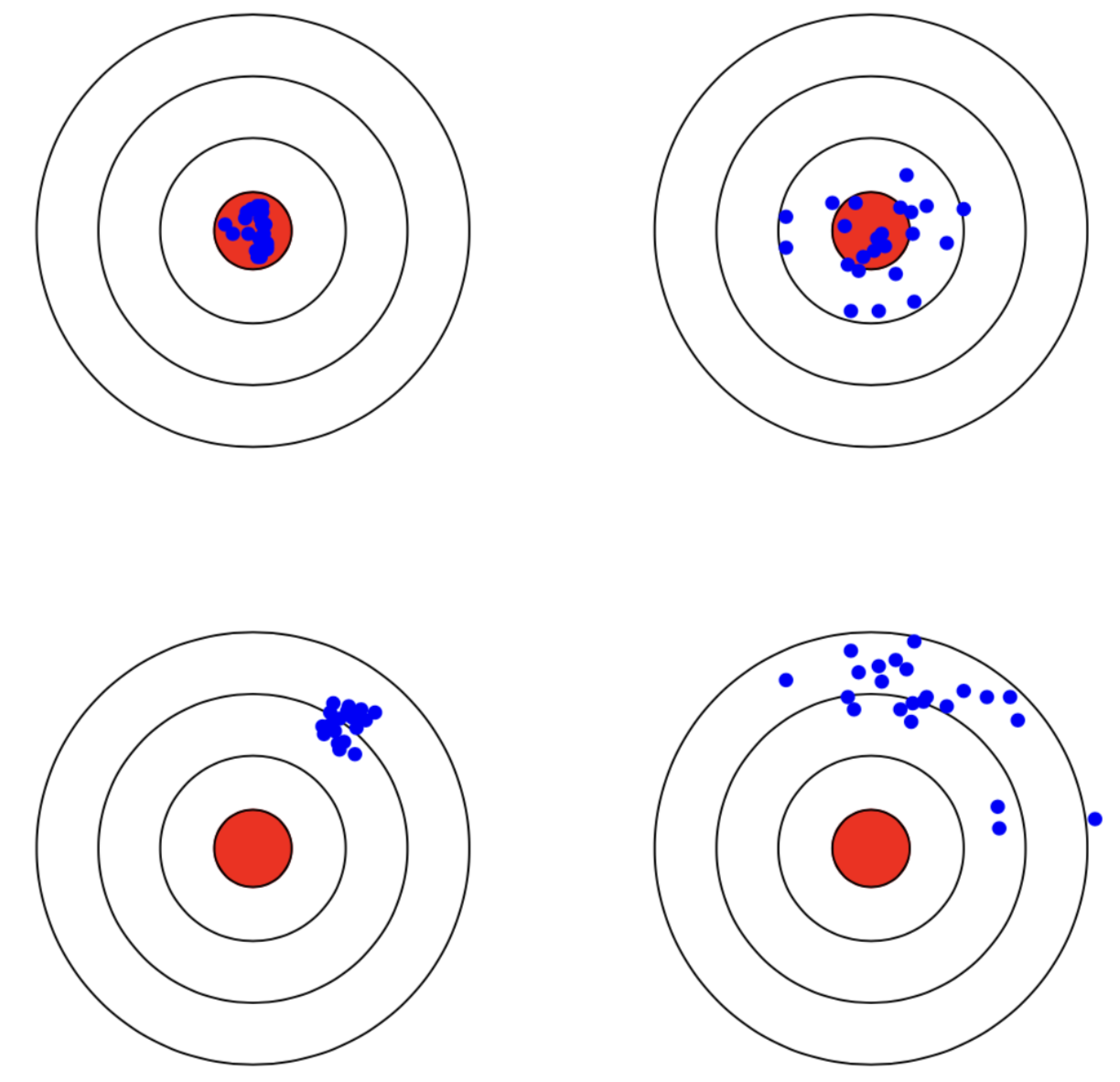
如上图,红色区域是学习算法完美的正确预测值,蓝色点为每个数据集所训练出的模型对样本的预测值。对于方差,蓝色点越集中,方差越小。对于偏差,蓝色点越偏离红色区域,偏差则越大,预测效果越差。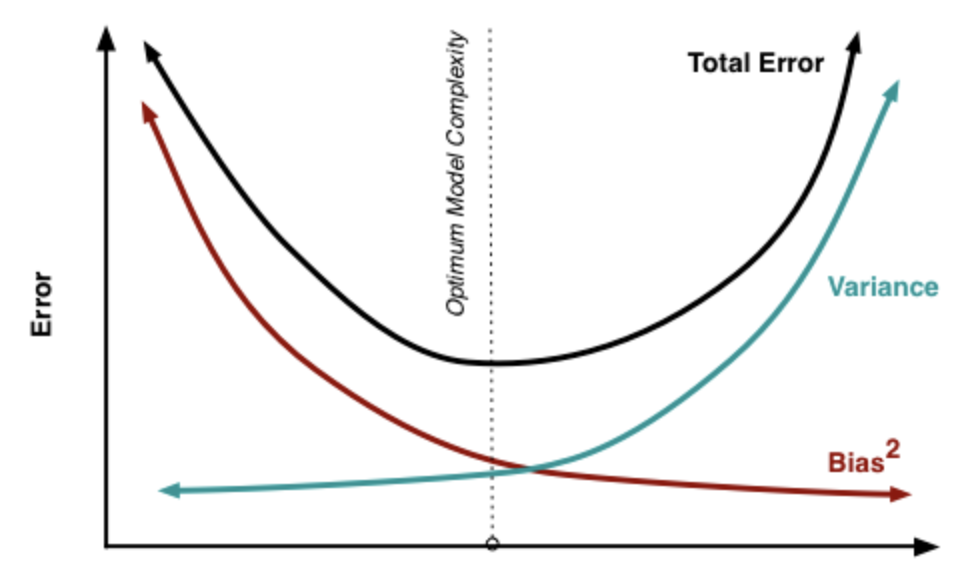
偏差和方差可以与欠拟合和过拟合进行比较:训练初期,欠拟合,学习器的拟合能力不够强,偏差比较大。在充分训练后,学习器的拟合能力非常强,训练数据的轻微扰动都会导致学习器发生显著变化,过拟合,方差大。
噪声是指数据中无法避免的随机误差,主要包括标签错误、特征测量误差、环境干扰等,反映了数据本身的可靠性问题。
总结:
- 偏差: 度量学习算法的期望预测与真实结果的偏离程度,即刻画了学习算法本身的拟合能力。
- 方差: 度量了同样大小的训练集的变动所导致的学习性能的变化,即刻画了数据扰动所产生的影响。
- 噪声: 表达了在当前任务上任何学习算法所能达到的期望泛化误差的下界,即刻画了学习问题本身的难度。
残差连接 Residual Connection
在Transformer架构中,处处可以看到残差连接的身影,这是一种如今在深度学习模型中经常使用的技术,旨在解决梯度消失。残差连接首次由何恺明等人在2015年的论文《Deep Residual Learning for Image Recognition》中提出。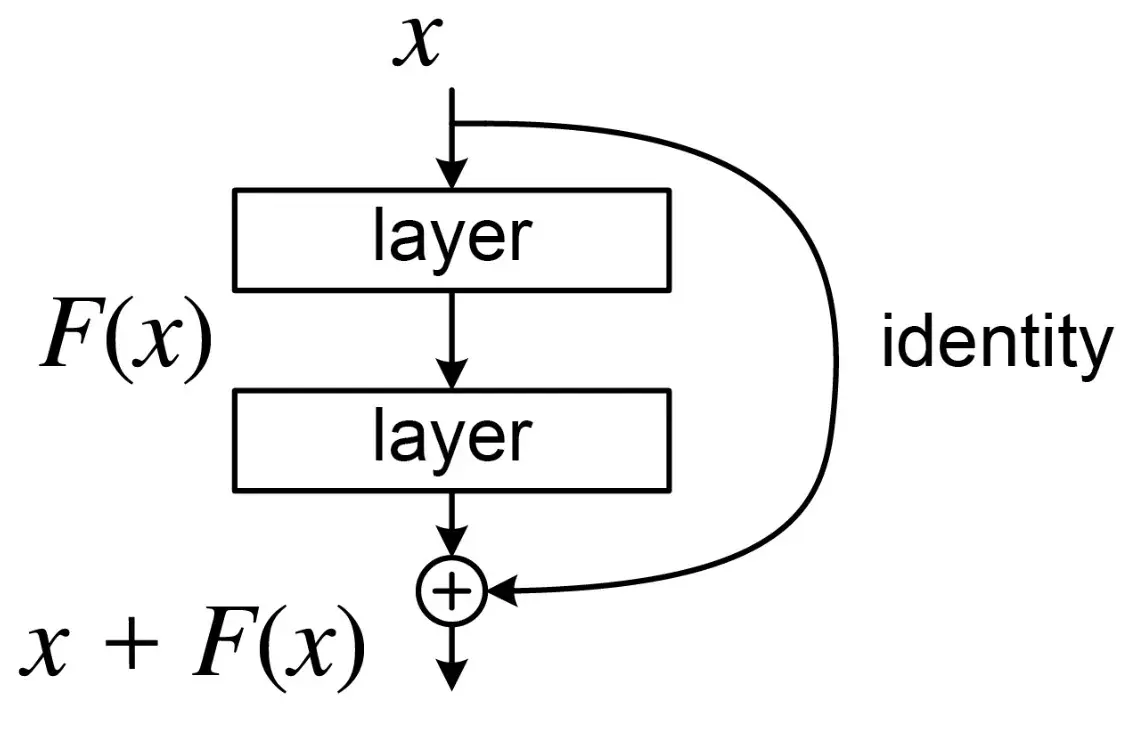
上图是残差连接的结构。我们可以看到残差连接实际上是建立了输入输出之间的一条捷径,一条“高速公路”。假设输入为x,经过非线性变换后输出为F(x),引入残差连接后,输出就变为了F(x) + x,模型此时只需要学习残差映射,即为F(x) = H(x) - x。
这样做的好处是,首先可以避免梯度的消失和爆炸。对于梯度爆炸,因为残差连接的引入,网络可以在需要时倾向于学习更简单的函数,输入直接恒等连接至输出,这样在反向传播时就避免了一次梯度的相乘,防止梯度爆炸的情况产生。而对于梯度消失,即使学习的过程中,残差映射的梯度消失了,输入也能传输至输出,上一层的梯度可以完好无损的传递到下一层。
其次,残差连接加快模型的收敛。上面提到了网络在需要时倾向于学习更简单的函数,在一些恒等映射或者接近于恒等映射的情况,这条“高速公路”将输入直接连接至输出,加快网络收敛,毕竟让复杂的非线性函数去学习恒等映射是相当困难的。
最后,残差连接具有很强的扩展性。在很多架构中都能看到残差连接的身影,它可以很轻松的加入到这些架构中。同时在训练很深的网络时,残差连接的特性使得网络可以维持性能。
评估技术
BLEU
BLEU(Bilingual Evaluation Understudy)是一种用于评估机器翻译质量的算法,通过比较机器翻译的结果与人工参考译文的相似度进行评分。BLEU的计算公式如下:
其中:
$w_n$为权重,通常采用均匀分布,即为$1/N$
BP为长度惩罚因子,用于惩罚长度过短的翻译。定义中$c$表示候选译文的长度,$r$表示有效参考译文的长度。
$p_n$是$n-gram$精度,是BLEU算法的核心,它用于衡量连续的$n$个词汇(通常为$1-gram$至$4-gram$)在候选译文和有效参考译文中的重叠度。下图是$p_n$计算的例子。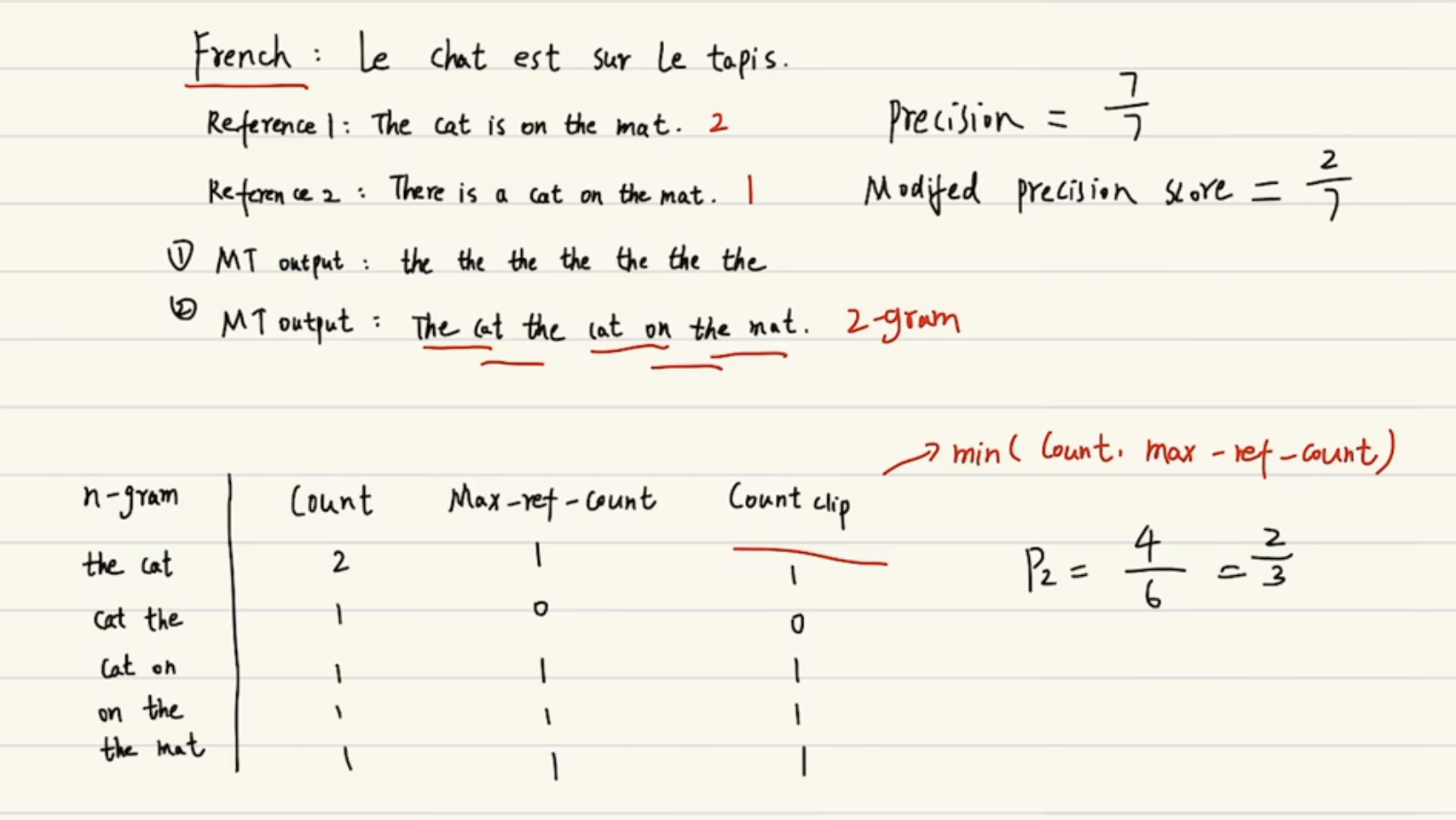
我们可以看到,为了避免过度生成高频词,每个$n-gram$的计数不回超过其在单个参考译文中所出现的最大次数。
BLEU中为什么要对$p_n$使用$log$求和?
我个人的理解是,首先,随着$n$的增大,$p_n$是呈现指数级别的下降的,为了避免因为某个$n-gram$匹配度极低对整体评分影响过大,因此采用$log$求和。其次,如果我们将$w_n = 1/N$代入公式,我们可以发现是对$p_n$求几何平均数,使用$log$也可以避免连乘可能带来的浮点数下溢。